


Rapidité
Rapidité dans le domaine temporel
Rappel :
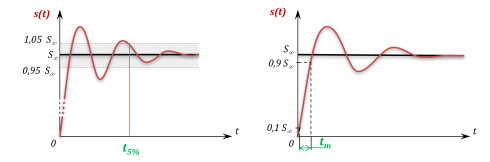
La rapidité est caractérisée par le temps que met le système à réagir à une variation brusque de la grandeur d'entrée.
Dans la pratique, deux paramètres permettent de quantifier la rapidité d'un système à partir de sa réponse indicielle : le temps de réponse à 5% noté
 et le temps de montée noté
et le temps de montée noté
 .
.
Rapidité dans le domaine de Laplace
Fondamental : Système du premier ordre
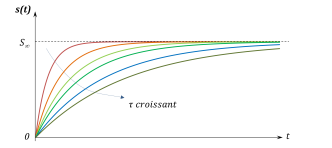
Le temps de réponse à 5% d'un système du premier ordre de fonction de transfert
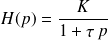 est tel que :
est tel que :

Ainsi, plus la constante de temps
 est petite, plus le système est rapide.
est petite, plus le système est rapide.

Fondamental : Système du deuxième ordre
Le temps de réponse à 5% d'un système du deuxième ordre de fonction de transfert
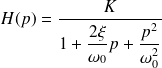 se lit sur l'abaque des temps de réponse réduits.
se lit sur l'abaque des temps de réponse réduits.
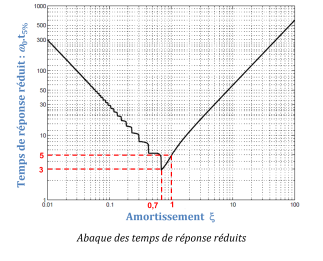
La réponse la plus rapide d'un système du second ordre est obtenue pour un coefficient d'amortissement
 . Dans ce cas,
. Dans ce cas,
 et la réponse temporelle possède un premier dépassement d'exactement 5%.
et la réponse temporelle possède un premier dépassement d'exactement 5%.
La réponse la plus rapide sans dépassement d'un système du second ordre est obtenue pour un coefficient d'amortissement
 . Dans ce cas,
. Dans ce cas,
 .
.
Rapidité dans le domaine fréquentiel
La rapidité d'un système dans le domaine fréquentiel est définie par sa bande passante. On distingue :
la bande passante à -3dB en boucle fermée ;
la bande passante à 0dB en boucle ouverte.
Lorsque l'on parle de bande passante sans indication supplémentaire, il s'agit le plus souvent de celle à -3dB en boucle fermée.
Bande passante à -3dB en boucle fermée
Définition :
La bande passante à -3dB est l'intervalle de fréquence (ou de pulsation) pour lequel le gain en dB de la FTBF subit une atténuation inférieure à 3dB de sa valeur maximale.
La valeur de 3dB correspond à une amplitude de sortie diminuée d'un facteur
 par rapport à la valeur maximale.
par rapport à la valeur maximale.
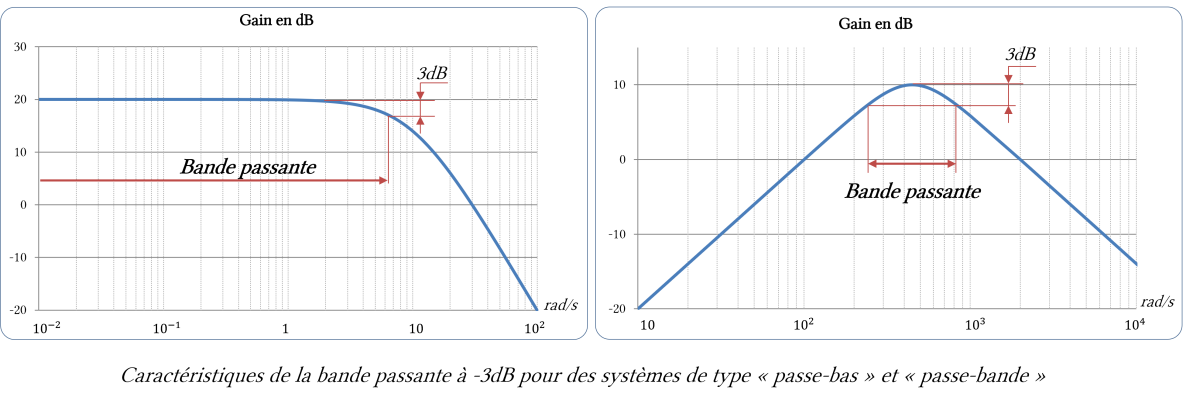
Remarque :
La majorité des systèmes asservis se comporte comme des «passe-bas », c'est à dire qu'ils réagissent conformément aux consignes à basse fréquence et ne parviennent plus à suivre les mouvement rapides à haute fréquence. Dans ce cas, la bande passante s'étend alors de 0 à la pulsation de coupure, caractérisée par la limite à -3dB.
Fondamental :
Plus la bande passante est grande, plus le système est rapide :
Pour un système d'ordre 1,
 . Ainsi, lorsque la bande passante augmente,
et donc
diminuent.
. Ainsi, lorsque la bande passante augmente,
et donc
diminuent.
Pour un système d'ordre 2, et pour un coefficient d'amortissement
 donné, la bande passante est liée à la pulsation propre du système non amorti
donné, la bande passante est liée à la pulsation propre du système non amorti
 , et
, et
 . Ainsi lorsque
augmente, la bande passante augmente et
diminue.
. Ainsi lorsque
augmente, la bande passante augmente et
diminue.
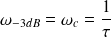
Bande passante à 0dB en boucle ouverte
Définition :
La bande passante à 0 dB d'un système correspond à l'intervalle de fréquence (ou de pulsation) pour lequel le gain de la FTBO est supérieur ou égal à 0dB. Elle correspond donc directement à
 .
.
Lien entre bande passante à -3dB en boucle fermée et bande passante à 0 dB en boucle ouverte
La bande passante à -3dB d'un système asservi (en boucle fermée) est étroitement liée à la bande passante à 0dB de sa FTBO. En effet, en considérant un système à retour unitaire non perturbé :
Le gain de la FTBF à la pulsation de coupure à 0dB de la FTBO (
) vaut :
Or
 par définition et donc
par définition et donc
 où
où
 correspond au déphasage de la FTBO à la pulsation
.
correspond au déphasage de la FTBO à la pulsation
.
Ainsi :
![\begin{eqnarray*} G_{dB\textrm{FTBF}}(\omega_{0dB}) & = & -20\log \sqrt{\left[ 1+\cos(\varphi_{0dB})\right]^2+\left[ \sin(\varphi_{0dB})\right]^2} \\ & = & -10\log\left[2+2\cos(\varphi_{0dB})\right] \\ & = & -3\text{dB}-10 \log\left[1+\cos(\varphi_{0dB})\right] \end{eqnarray*}](../res/Bande_passante_3.png)
Pour des raisons de marge de stabilité, la marge de phase de la FTBO n'est jamais trop éloignée de -90° si bien que le gain en dB de la FTBF est proche de -3dB. Ainsi :
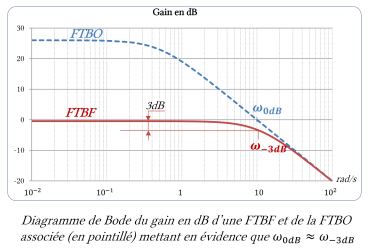
Remarque :
La figure précédente montre les diagrammes de Bode des gains d'une FTBO et de la FTBF associée. En plus de vérifier que
 , on peut remarquer que pour des pulsations élevées, la FTBF tend vers la FTBO.
, on peut remarquer que pour des pulsations élevées, la FTBF tend vers la FTBO.




